This is the most commonly used and most complete calibration involving two ports. All four S-parameters (S11, S12, S21, and S22) are fully corrected.
Full 1 Port
A single reflection parameter is fully corrected in this case (S11 or S22). Both ports can be covered but only reflection measurements will be corrected. This calibration type is useful for reflection-only measurements including the possibility of doing two reflection-only measurements at the same time.
1 Path 2 Port (Forward or Reverse)
In this case, reflection measurements on one port are corrected and one transmission path is partially corrected (load match is not). Here forward means S11 and S21 are covered while reverse means S12 and S22 are covered. This technique may be used when speed is at a premium, only two S-parameters are needed and either the accuracy requirements on the transmission parameter are low or the DUT is very lossy (≅ >10-20 dB insertion loss).
Frequency Response (Reflection Response and Transmission Frequency Response)
This calibration is essentially a normalization and partially corrects one parameter (although two can be covered within the cal menus). Only the frequency response, or tracking slope, of the parameter is corrected so directivity and match behaviors are not taken into account. This technique is valuable when accuracy requirements are not at a premium and a quick measurement is all that is needed.
Each of these calibrations has an associated error model that describes what is being corrected. The error coefficients used fall into several categories that roughly describe the physical effect that they are responsible for correcting.
Note
The calibration types and modes change when the VNA is in multiport (4-Port) mode. See Multiport Measurements for a discussion of multiport calibration methods and types.
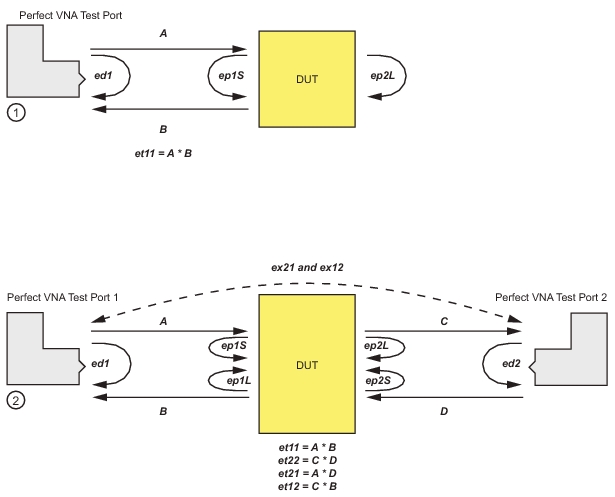
To establish a context for these error terms, consider the usual model where all of the VNA/setup errors are lumped into error boxes (that act like S-parameters) between a perfect VNA and the DUT reference planes (see Figure: Classic One- and Two-Port Error Models).
Classic One- and Two-Port Error Models
1. At top, a classic One-Port Error Model.
2. At bottom, a classic Two-Port Error Model
Two slightly different error models are used: one where each port is considered to be driving separately (so one can clearly delineate source match from load match) and one where both ports are present and no driving distinction is made (requiring some preprocessing to take care of source match-load match differences).
• Directivity
Directivity (ed1 and ed2) describes the finite directivity of the bridges or directional couplers in the system. Partially includes some internal mismatch mechanisms that contribute to effective directivity.
• Source Match
Source match (ep1S and ep2S) describes the return loss of a driving port.
• Load Match
Load match (ep1L and ep2L) describes the return loss of a terminating port. In the 8-term error models used as a basis for the LRL/LRM and other calibration families, this is treated as the same as source match but the incoming data is precorrected to take into account the (measured) difference in match between driving and terminating states.
• Reflection Tracking
Reflection tracking (et11 and et22) describes the frequency response of a reflect measurement including loss behaviors due to the couplers, transmission lines, converters, and other components.
• Transmission Tracking
Transmission tracking (et12 and et21) is the same as above but for the transmission paths. The tracking terms are not entirely independent and this fact is used in some of the calibration algorithms.
• Isolation
Isolation (ex12 and ex21) takes into account certain types of internal (non-DUT dependent) leakages that may be present in hardware. It is largely present for legacy reasons and is rarely used in practice since this type of leakage is typically very small in modern VNAs.