This section contains some general hints on successful mixer measurements along with some tips on how to conduct ancillary measurements like coarse spur analysis. The topics are:
• For scalar-like measurements (normalization-based conversion loss measurements for example), mismatch can be critical. If the DUT is poorly matched, consider padding the test ports before calibration.
• Even for enhanced match calibration situations, the match seen by higher order products can matter if the DUT is non-linear enough.
• Know what the compression level of the DUT is. The default power levels of the VNA (+5 dBm for some models) can compress many simple mixers and particularly high gain converters.
• Understand the frequency plan of the DUT, particularly the relationship of the input frequency to the LO in downconversion cases.
• Knowing all of the required measurements in advance can help speed up the setup when using the multi-channel wizard
• For complex conversion scenarios (harmonic or subharmonic conversion, multiple LOs and multiple stages, etc.), the multiple source control system see Multiple Source Control (Option 7)) gives very flexible control of the internal sources and up to 4 external synthesizers.
• Know the required LO power. Often one might assume a required power based on the mixer architecture (e.g., +7 dBm for a double balanced Si diode mixer), but with so many technologies and topologies available, these assumptions may be less valid than in the past. In certain high gain DUTs, LO leakage out the port can be large enough to induce compression in the instrument as well (filtering may help in this extreme case).
• As with S-parameter measurements, consider the calibration method to be used based on the available calibration kits/standards and their respective uncertainties.
• The receiver/norm and enhanced match mixer calibration measurements help to get conversion gain, but this is all based on an unratioed parameter measurement (e.g., b2/1) and is hence affected by drive power. In earlier software versions (V2021.6.1 and before), this relationship was absolute: if the drive power changed, the displayed conversion gain will be in error by the amount of that power change. Later versions correct for input power shifts, at least so far as the instrument is aware of them, so caution is warranted in complex setups where the converter drive power is not directly related to an internal source setting.
Dealing with Uncertainty Terms
On the subject of uncertainties, the one new measurement (conversion gain/loss) warrants some additional commentary. For a normalization-based calibration, there are several uncertainty terms
• Port power accuracy (1 to 2 dB without a power calibration, 0.1 to 0.2 dB typically with a power calibration)
• Receiver calibration accuracy (typically <0.5 dB based on port mismatch)
• Linearity accuracy (<0.1 dB assuming away from compression)
• Mismatch interaction with DUT
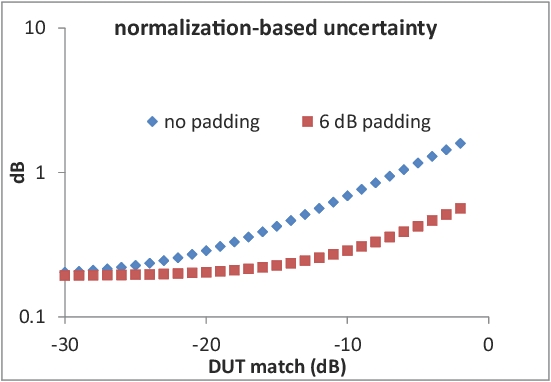
Assuming nearly optimal typical numbers for the other terms, an estimate of total uncertainty on conversion loss vs. DUT match (assumed symmetric and unilateral) is plotted in Figure: Normalization-Based Uncertainty with and without some modest (6 dB) port padding. As might be expected, the worse the DUT match, the greater the value of the port padding.
Normalization-Based Uncertainty
An estimate of normalization-based conversion gain/loss uncertainty versus DUT match is plotted here
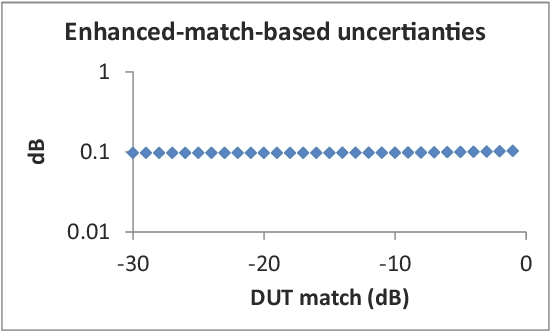
With the enhanced match calibration, the receiver calibration and DUT interaction uncertainties can reduce dramatically. The residual errors are based on a common SOLT calibration and the same unilateral assumptions as before are employed to simplify the calculation. The results are shown in Figure: Enhanced-Match Based Uncertainties. The scales are changed and no padding was assumed. The result is largely match-invariant assuming the surrounding calibration was adequate.
Enhanced-Match Based Uncertainties
An estimate of enhanced-match based uncertainties vs. DUT match are plotted here under the assumptions stated in the text.